
Introducing my ongoing robotics project, currently named DonkeyJet, inspired by the Donkey Car project. This mobile robot is built on an RC car frame and powered by Jetson Nano, providing a hands-on platform for practicing robotics knowledge. The goal is to continually enhance its capabilities while exploring various aspects of robotics technology. While I’m not certain about the name DonkeyJet, I invite you to follow me on this exciting journey of discovery as I document my progress and share insights with fellow enthusiasts.
Purpose
Hopefully, this project will give me tons of learning opportunities in different topics including but not limited to:
- ROS 2
- Embedded Linux
- Localization
- Mapping
- Planning
- Control
- …..
Hardware
Currently the car is made of these components:
- A 1/16 scale RC Car as chassis. I am using this one specifically, but there are many RC Cars that would work with this project.
- It comes with a DC Motor for the throttle, a Servo for steering, ESC to control both of them and a battery.
- NVIDIA Jetson Nano as the brain
- Adafruit 16-Channel I2C Servo Driver based on PCA9685
- Power bank to power the Jetson Nano
- Intel RealSense Sensors, D435 and T265. I am still not sure if I am able to power them both via Jetson’s USB ports.
- T265 has IMU (3-axis accelerometer and gyroscope) onboard.
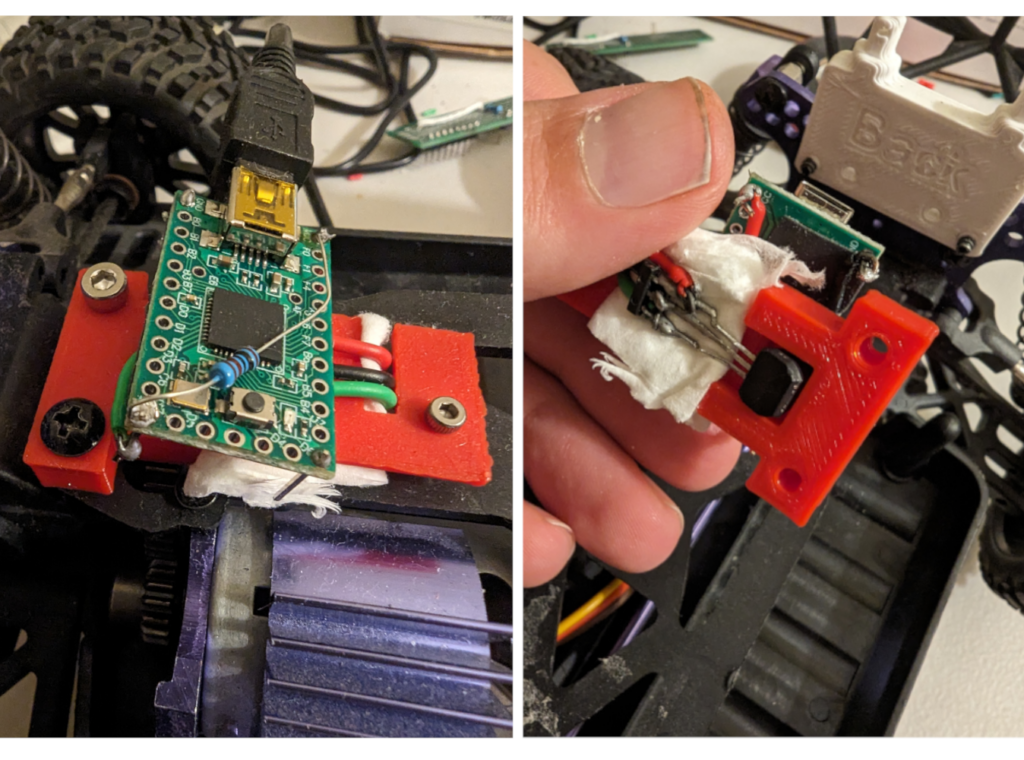
- 3D-printed parts to mount the hardware to the chassis. If you are interested in the 3D files or prints, let me know in the comments.
I needed to remove some parts of the RC Car first, including the cover and radio receiver, and we had to mount everything. The Donkey Car documentation describes it very well. I had to modify the 3D-printed parts to fit the Jetson and the Realsense sensors.
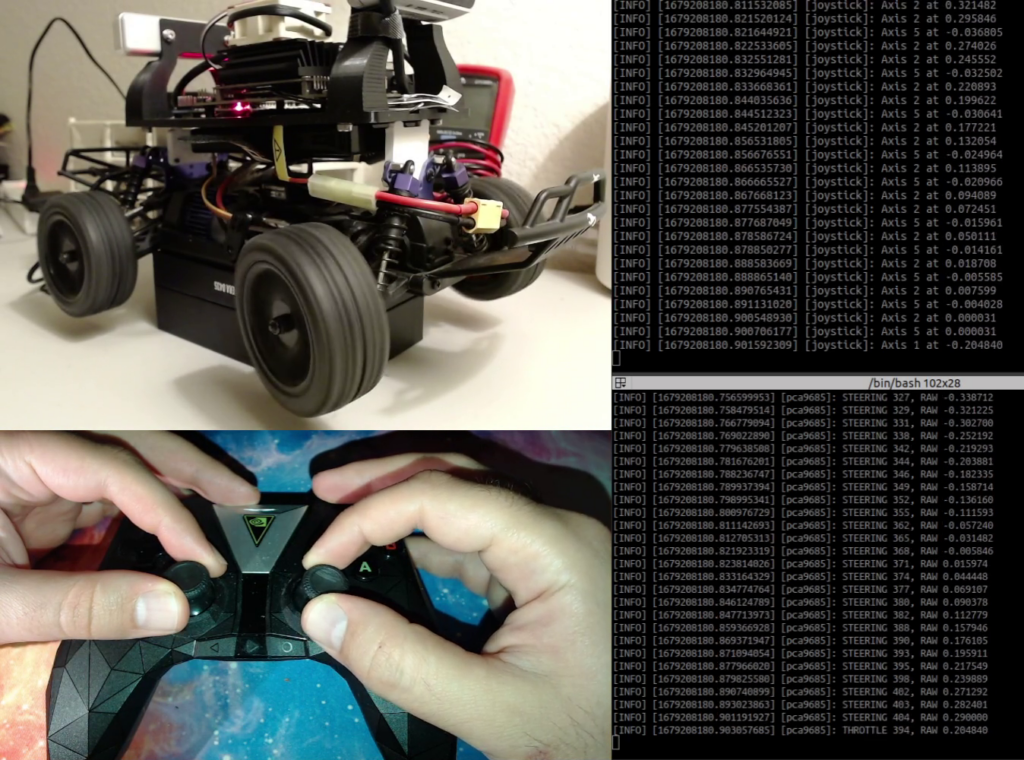
Here are some images of the current state of the DonkeyJet.




Hello, I am a student studying ROS2.
I am interested in 3D printing parts for mounting hardware onto a chassis, such as 3D files or printed objects. Could you please share any materials related to this? I’m leaving my email address here. Thank you!